Case Study
Autonomous Multi-Rover Search System
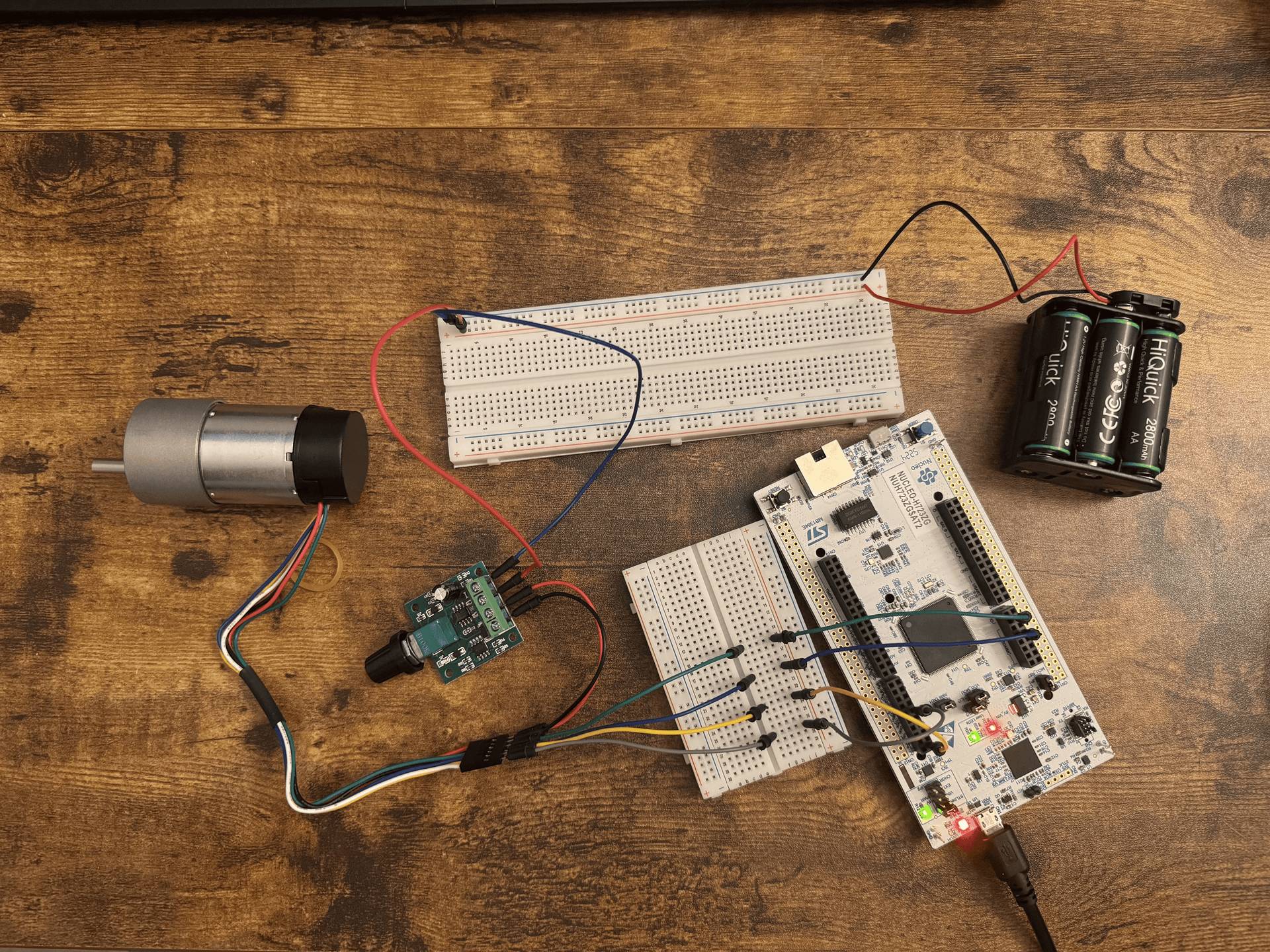
Autonomous rover systems must reliably integrate multiple sensors with different update rates while maintaining consistent state estimation and stable hardware communication. Designing a command and data handling framework that manages sensor timing, embedded firmware constraints, and real-world hardware testing is critical for reliable autonomous operation.
- Role
- Command & Data Handling (CDH) EngineerUniversity of Colorado Boulder — Senior Design Project • Fall 2025 – Spring 2026
Embedded firmware development, sensor polling architecture design, encoder data handling, electronics prototyping, and rover state monitoring for an autonomous multi-robot search system.
- Tools & Skills
- Embedded C/C++Sensor polling architectureQuadrature encoder processingI²C communicationLiDAR sensor integrationINA260 current/voltage monitoringBreadboard electronics prototypingHardware debugging & validation
- Outcome
- Developed a dual-rate sensor polling architecture to manage sensors operating at different update frequencies.
Academic senior design project focused on autonomous robotics architecture and embedded command and data handling.
View case study →Case Study
Harness Assembly Instructions & Documentation Standardization
Harness builds relied on tribal knowledge and inconsistent documentation, creating confusion during assembly and handoff between design, manufacturing, and integration, increasing the risk of rework.
- Role
- Manufacturing Engineering InternBlue Canyon Technologies • May–Aug 2025
Assembly documentation and process support (no electrical design ownership).
- Tools & Skills
- VisioArasIONWork instructionsManufacturing documentationCross-functional communication
- Outcome
- Created standardized harness assembly instructions with defined routing, labeling, and step-by-step build guidance.
No proprietary drawings or part identifiers are shown.
View case study →Case Study
NCR Resolution & Drawing Redlines for Production Support
Build issues and unclear documentation created slowdowns and rework risk during manufacturing and integration, requiring fast, accurate clarification of design intent.
- Role
- Manufacturing Engineering InternBlue Canyon Technologies • May–Aug 2025
Non-conformance support, drawing redlines, and documentation updates (no design authority).
- Tools & Skills
- ArasIONVisioDrawing redlinesNCR workflowsRoot-cause analysisCross-functional communication
- Outcome
- Investigated non-conformances and documented findings to support corrective actions and next-build execution.
Details are generalized; no proprietary part numbers, drawings, or internal reports are shown.
View case study →- Role
- CNC OperatorCircular Technologies • Jan-May 2024
CNC production support and inspection using standard metrology tools.
- Tools & Skills
- FANUC RoboDrillCNC production milling & turningMicrometersCalipersGo/No-Go gagesOptical comparatorDigital microscopeProduction inspection
- Outcome
- Performed in-process and final inspection to verify tolerance compliance on production parts, including runout, concentricity, and critical feature geometry.
View case study →Case Study
Modular RC Aircraft Structural Design for Rapid Iteration
Large RC airframes must balance structural strength, weight, and manufacturability while remaining easy to assemble, modify, and repair during iterative development.
- Role
- CAD DesignerPersonal Project / Remote Collaboration • Jul–Dec 2024
Wing modeling, internal fuselage support design, and CAD-driven DFM/DFA decisions for modular airframe assemblies.
- Tools & Skills
- Fusion 360DFM/DFAStructural layoutFastener and fit planningRapid prototyping3D printing
- Outcome
- Modeled modular wing components with defined interfaces to support repeatable assembly and straightforward replacement.
View case study →Case Study
Boost-Glide Vehicle Design & Trade Study
Boost-glide vehicles require balancing aerodynamic efficiency, stability through boost and glide phases, and manufacturability within tight mass and geometry constraints.
- Role
- Aerospace Engineering Student — Vehicle Design & AnalysisUniversity of Colorado Boulder (ASEN 2804) • Spring 2024
Conceptual vehicle design, aerodynamic trade studies, stability analysis, and experimental flight testing.
- Tools & Skills
- MATLABAerodynamic modelingTrade studies & sensitivity analysisStatic stability analysisFlight test data analysisHand calculations
- Outcome
- Evaluated multiple vehicle configurations and selected a manufacturable boost-glide design based on performance trade studies.
Academic project; no proprietary or controlled data included.
View case study →Case Study
Custom FPV Quadcopter Integration & Flight System Setup
Small UAV platforms require tight integration between propulsion electronics, RF communication, flight control firmware, and power systems. Achieving reliable flight requires correct electrical assembly, firmware configuration, and system tuning.
- Role
- Solo Builder — Assembly, Setup, and TestingPersonal Project • Summer 2020
Hardware assembly, electronics soldering, RF system integration, firmware flashing, flight configuration, and payload mount design.
- Tools & Skills
- Betaflight flight firmwareSolderingBrushless motor systemsLiPo battery systemsFPV analog video systemsRC radio control systemsFusion 360 (payload mount design)3D printing
- Outcome
- Assembled a carbon-fiber quadcopter frame integrating brushless motors, flight controller, and ESC stack.
Personal hardware project demonstrating early experience with UAV electronics integration and flight systems.
View case study →