Case Study
Autonomous Multi-Rover Search System
Autonomous rover systems must reliably integrate multiple sensors with different update rates while maintaining consistent state estimation and stable hardware communication. Designing a command and data handling framework that manages sensor timing, embedded firmware constraints, and real-world hardware testing is critical for reliable autonomous operation.
- Role
- Command & Data Handling (CDH) EngineerUniversity of Colorado Boulder — Senior Design Project • Fall 2025 – Spring 2026
- Tools & Skills
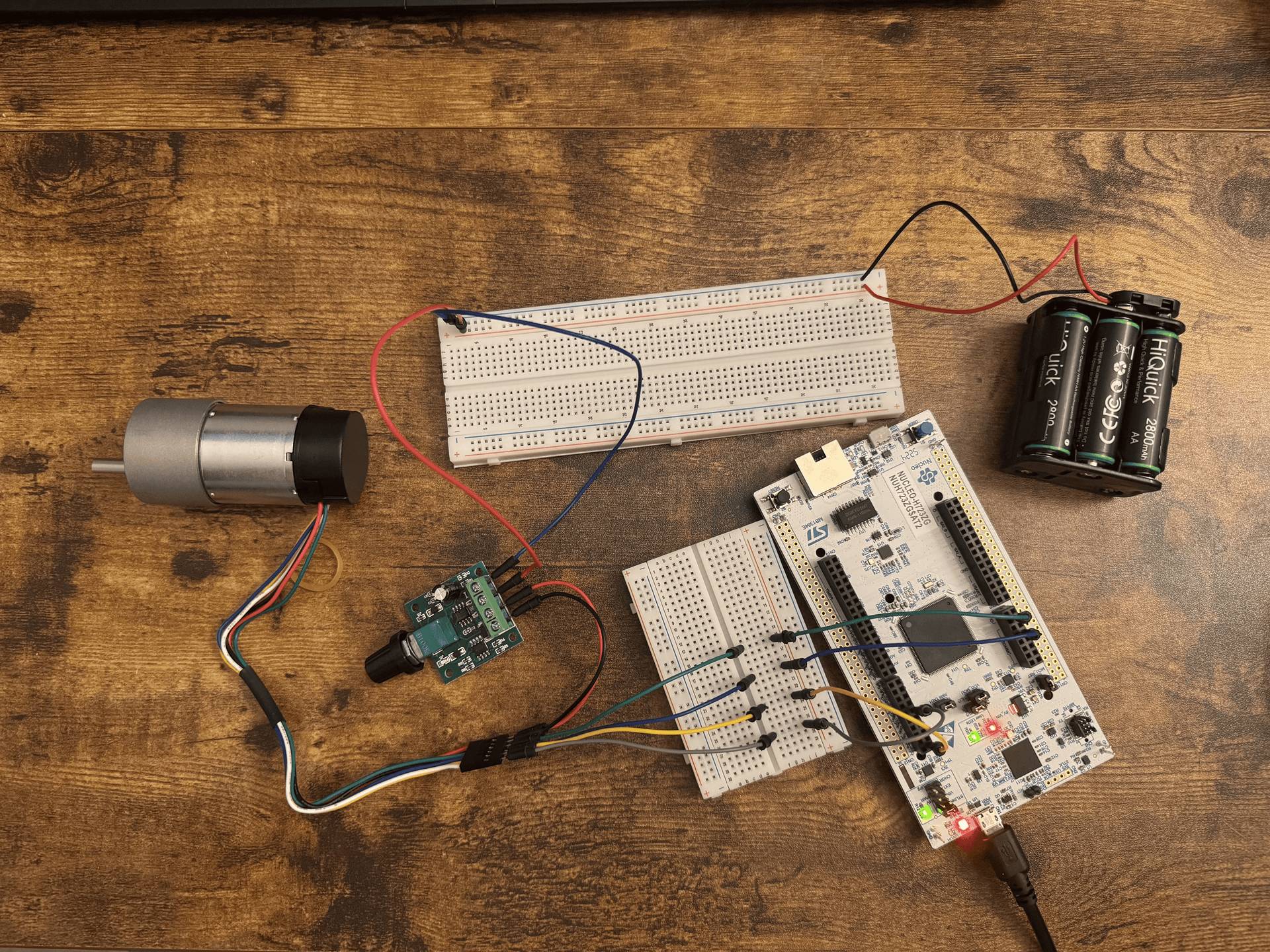
- Embedded C/C++Sensor polling architectureQuadrature encoder processingI²C communicationLiDAR sensor integrationINA260 current/voltage monitoringBreadboard electronics prototypingHardware debugging & validation
- Outcome
- Developed a dual-rate sensor polling architecture to manage sensors operating at different update frequencies.
Embedded firmware development, sensor polling architecture design, encoder data handling, electronics prototyping, and rover state monitoring for an autonomous multi-robot search system.
Academic senior design project focused on autonomous robotics architecture and embedded command and data handling.
View case study →